 重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
题目
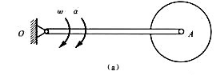
题11-5图(a)所示系统由均质圆盘与均质细杆铰接而成。已知圆盘半径为r,质量为M,质量为m。在图示水平位置杆的角速度为w,角加速度为a,圆盘的角速度,角加速度均为零,试求系统惯性力系向定轴O简化的主矢与主矩。
 更多“题11-5图(a)所示系统由均质圆盘与均质细杆铰接而成。已知圆盘半径为r,质量为M,质量为m。在图示水”相关的问题
更多“题11-5图(a)所示系统由均质圆盘与均质细杆铰接而成。已知圆盘半径为r,质量为M,质量为m。在图示水”相关的问题
第1题
杆OA绕O轴逆时针转动,均质圆盘沿OA杆纯滚动。已知圆盘的质量m=20kg,半径R=100mm。在题9-4图(a)所示位置时,OA杆的倾角为30,其角速度为w1=1rad/s,圆盘相对OA杆转动的角速度v2=4rad/s, B= mm,试求圆盘的动量。
mm,试求圆盘的动量。

第2题
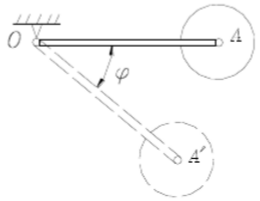
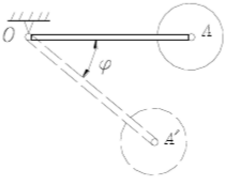
均质细杆OA可绕水平轴O转动,另一端铰接一均质圆盘,圆盘可绕铰A在铅直面内自由旋转,如图13-40所示。已知杆OA长l,质量为m1;圆盘半径为R,质量为m2。摩擦不计,初始时杆OA水平,杆和圆盘静止。求杆与水平线成 角的瞬时,杆的角速度和角加速度。
角的瞬时,杆的角速度和角加速度。
第3题
质量为m1,长为l的均质杆AB的A端与滑块A铰接于A点,B端与质量为m2,半径为R的均质圆盘铰接于B点,滑块A可在铅垂导槽中滑动,不计滑块质量以及滑块与导槽的摩擦,圆盘可沿固定水平面作无滑动的滚动,如图(a)所示。设系统由图示位置释放,求杆AB到达水平位置时的角速度和圆盘中心B的速度。

第4题
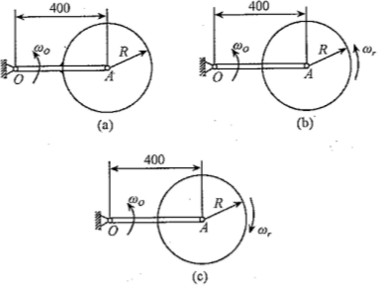
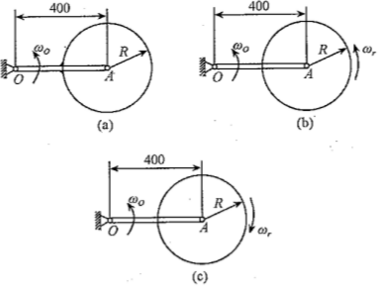
无重杆OA以角速度ωO绕轴O转动,质量m=25kg、半径R=200mm的均质圆盘以二种方式安装于杆OA的点A,如题12-2图所示。在图a中,圆盘与杆OA焊接在一起;在图b中,圆盘与杆OA在点A铰接,且相对杆OA以角速度ωr逆时针向转动;在图c中,圆盘相对杆OA以角速度ωr顺时针向转动。已知ωO=ωr=4rad/s,计算在此三种情况下,圆盘对轴O的动量矩。
第5题
求题9-3图所示均质物体或物体系统的动量。
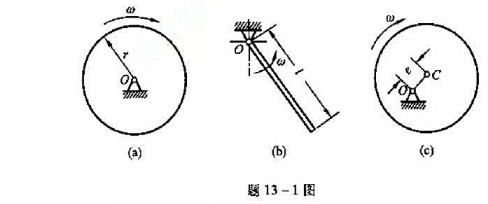
(a)均质轮质量为m,半径为R,绕质心轴C转动,角速度为w,如题9-3图(a)所示。
(b)非均质轮质量为m,半径为R,偏心距为e,绕轴O转动,角速度为w,如题9-3图(b)所示。
(c)均质轮质量为m,半径为R,沿水平直线轨道纯滚动,轮心的速度为U,如题9-3图(c)所示。
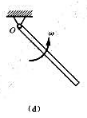
(d)均质杆质量为m,杆长为L,绕杆端轴O转动,角速度为w,如题9-3图(d)所示。
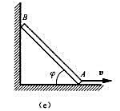
(e)均质杆质量为m,杆长为L,题图9-3(e)所示瞬时A端速度为v。
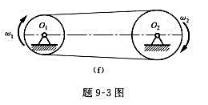
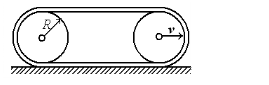
(F)皮带轮传动系统由均质轮和均质皮带组成,轮O1的质量为m1,半径为r1,轮O2的质量为m2,半径为r2,皮带的质量为m2,如题9-3图(F)所示。



第6题
图10-26均质圆盘质量为m,半径为R,所受约束如题10-26图(a)所示。若突然撒去A处的约束,试求该瞬时O处的约束力。

第7题
计算下列情况下物体对转轴O的动量矩:(1)均质圆盘半径为r、质量为m,以角速度ω转动;(2)均质杆长Ɩ、质量为m。以角速度ω转动;(3)均质偏心圆盘半径为r、偏心距为e,质量为m,以角速度ω转动。
第8题
量为m1;圆盘半径为R,质量为m2。摩擦不计,初始时杆OA水平,杆和圆盘静止。求杆与水平线成 角的瞬时,杆的角速度和角加速度。
角的瞬时,杆的角速度和角加速度。
第9题
图13-10所示坦克的履带质量为m,两个车轮的质量均为m1。车轮可视为均质圆盘,半径为R,两车轮轴间的距离为πR。设坦克前进速度为v,计算此质点系的动能。
第10题
无重杆OA以角速度ωO绕轴O转动,质量m=25kg、半径R=200mm的均质圆盘以3种方式安装于杆OA的点A,如图所示.在图(a)中,圆盘与杆OA焊接在一起;在图(b)中,圆盘与杆OA在点A铰接,且相对杆OA以角速度ωr逆时针方向转动;在图c中,圆盘相对杆OA以角速度ωr顺时针方向转动.已知ωO=ωr=4rad/s,计算在这3种情况下,圆盘对轴O的动量矩.
第11题
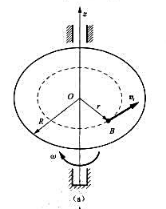
题10-14图(a)所示,半径为R,质量为m1的均质圆盘,可绕轴z转动一质量为m2的人在盘上由点B按规律s=at2/2沿半径为r的圆周行走,开始时,圆盘和人静止,不计轴承摩擦,试求圆盘的角速度和角加速度。
 相关内容
相关内容

 警告:系统检测到您的账号存在安全风险
警告:系统检测到您的账号存在安全风险
为了保护您的账号安全,请在“赏学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!































