重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
题目
已知某控制系统的方框图如图6-21所示,欲使系统在反馈校正后满足如下要求:
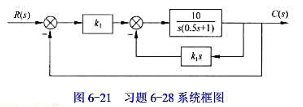
(1)速度稳态误差系数Kv≥5s-1;
(2)闭环系统阻尼比ξ=0.5;
(3)调节时间te(5%)≤2s。
试确定前置放大器增益k1及测速反馈系数kt(kt要求在0~1间选取)。
 更多“已知某控制系统的方框图如图6-21所示,欲使系统在反馈校正后满足如下要求:(1)速度稳态误差系数”相关的问题
更多“已知某控制系统的方框图如图6-21所示,欲使系统在反馈校正后满足如下要求:(1)速度稳态误差系数”相关的问题
第2题
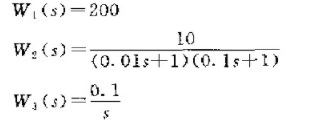
控制系统结构图如图6-2所示,其中 ,为了减少时间常数T2的影响,提高系统快速性,现采用位置反馈的校正方式,使时间常数T2诚小为原来的0.2,要求:
,为了减少时间常数T2的影响,提高系统快速性,现采用位置反馈的校正方式,使时间常数T2诚小为原来的0.2,要求:
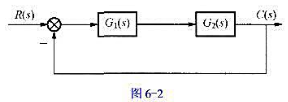
(1)画出校正后系统的结构图;
(2)确定位置反馈系数K;
(3)为了使校正后系统对于阶跃输入的稳态误差保持不变,K1应作何调整?
第3题
已知控制系统结构图如下所示
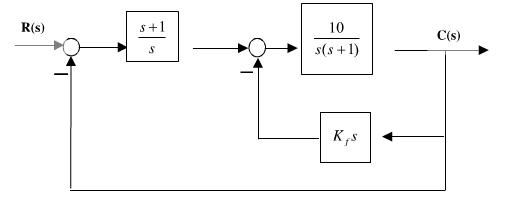
(1)分析说明内反馈Kfs的存在对稳定性的影响
(2)计算系统的静态位置误差系数、静态速度误差系数和静态加速度误差系数,并说明内反馈的存在对系统稳态误差的影响
第4题
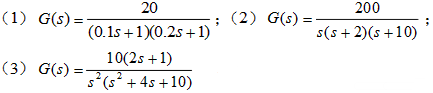
已知单位反馈控制系统的开环传递函数如下。
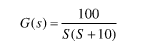
试求各系统的静态位置误差系数Kp,速度误差系数Kv和加速度误差系数Ka,并确定当输入信号分别为r(t)=ε(t)、2t、t2和1+2t+t2时系统的稳态误差ess。
第5题
一闭环反馈控制系统的动态结构图如图P3-3所示。
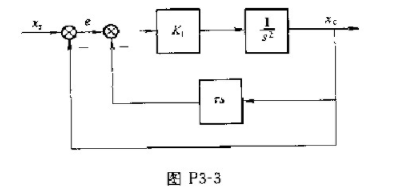
(1)求当 时,系统的参数
时,系统的参数 及τ值。
及τ值。
(2)求上述系统的位置稳态误差系数 速度稳态误差系数
速度稳态误差系数 加速度稳态误差系数
加速度稳态误差系数 及其相应的稳态误差。
及其相应的稳态误差。
第6题
某随动系统的开环传递函数为要求串入校正装置Gc(s),使系统校正后满足下列性能指标:(1)系统仍为Ⅰ型,稳态速度误差系数Kv≥1000(1/s),(2)调节时间ts≤0.25(s),超调量σP%≤30%。
第7题
已知控制系统结构如图3-54所示。
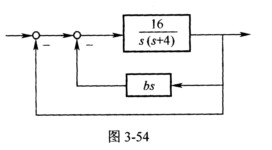 (1)当b=0时,试确定单位阶跃输入时系统的阻尼系数、自然频率、最大超调量以及单位斜坡输入所引起的稳态误差。 (2)确定系统阻尼比为0.8时的速度反馈常数b的值,并确定在单位阶跃输入下系统的最大超调量和单位斜坡输入所引起的稳态误差。 (3)怎样使(2)的阻尼比保持0.8不变而使其稳态误差等于(1)的稳态误差值。
(1)当b=0时,试确定单位阶跃输入时系统的阻尼系数、自然频率、最大超调量以及单位斜坡输入所引起的稳态误差。 (2)确定系统阻尼比为0.8时的速度反馈常数b的值,并确定在单位阶跃输入下系统的最大超调量和单位斜坡输入所引起的稳态误差。 (3)怎样使(2)的阻尼比保持0.8不变而使其稳态误差等于(1)的稳态误差值。
第8题
某随动控制系统结构如图3-9所示。已知K1=40V/rad,K2=0.5rad/(V·s),T=0.2s,τ=2V/rad。试求:
(1)加入速度反馈前后闭环系统动态性能指标(调节时间和超调量);
(2)为使加入速度反馈后的闭环系统出现临界阻尼的非振荡阶跃响应,τ应取何值?
第9题
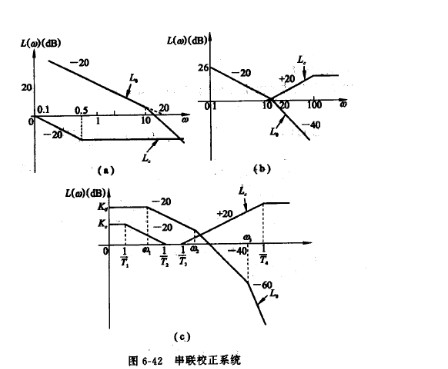
已知一单位反馈控制系统,其固定不变部分传递函数G0(s)和串联校正装置Gc(s)分别如图6-6(a)、(b)和(c)所示。要求:
(1)写出校正后各系统的开环传递函数。
(2)分析各Gc(s)系统的作用,并比较其优缺点。
第10题
列指标:稳态位置误差 稳态速度误差
稳态速度误差 =0.5%;
=0.5%; ≥45°试确定反馈校正装置的参数,并求等效开环传递函数。图中
≥45°试确定反馈校正装置的参数,并求等效开环传递函数。图中
第11题
已知单位反馈控制系统的开环传递函数如下:
试求输入分别为r(t)=2t和r(t)=2+2t+t2时,系统的稳态误差ess。
 相关内容
相关内容

 警告:系统检测到您的账号存在安全风险
警告:系统检测到您的账号存在安全风险
为了保护您的账号安全,请在“赏学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

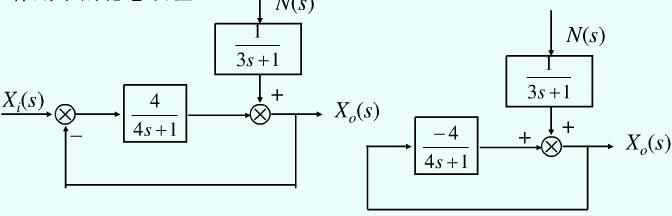
 ,试求输入Xi(s)和扰动N(s)作用下的稳态误差。
,试求输入Xi(s)和扰动N(s)作用下的稳态误差。