重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
题目
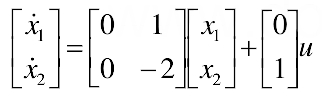
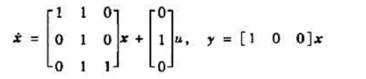
设系统状态方程为
试证明系统不是完全可观测的,并用可逆线性变换将其进行可观测性分解。
 更多“设系统状态方程为试证明系统不是完全可观测的,并用可逆线性变换将其进行可观测性分解。”相关的问题
更多“设系统状态方程为试证明系统不是完全可观测的,并用可逆线性变换将其进行可观测性分解。”相关的问题
第1题
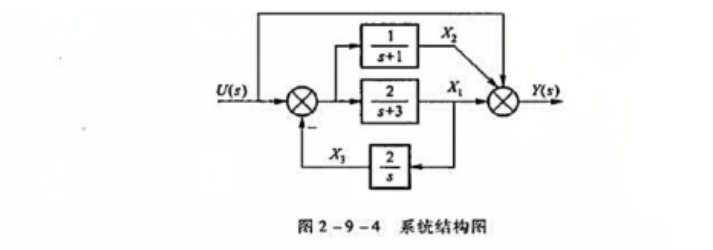
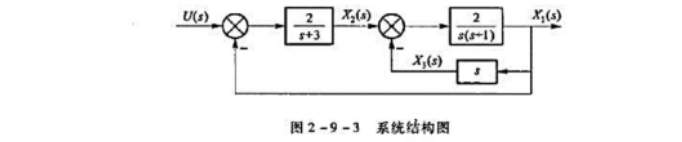
列写出如图2-9-3所示系统的状态方程表达式(取图中X1、X2和X3作为状态变最),并试确定该系统是否完全可控和完全可观测。
第2题
设一维系统的状态方程和观测方程为
xk+1=2xk+ωk
zk=xk+vk
设ωk和vk都是均值为零的白噪声,有关的统计特性还有
E(x0)=0,E()=4,E(ωkωj)=2δkj,E(vkvj)=1δkj,E(ωkvj)=0
已知观测值z0=0,z1=4,z2=3,z3=2。 试求(1|0),
(2|1),
(3|2),
(4|3)。
第3题
n阶线性定常系统的状态方程和输出方程为:
 若用X=Pz对系统进行线性变换,试对下面两个问题进行分析(要求给出分析过程)。 (1)线性变换是否改变u到y的传递函数矩阵? (2)线性变换是否改变系统的可控性?
若用X=Pz对系统进行线性变换,试对下面两个问题进行分析(要求给出分析过程)。 (1)线性变换是否改变u到y的传递函数矩阵? (2)线性变换是否改变系统的可控性?
第4题
设系统状态方程为

试设计一状态观测器,使其极点为-r、-2r(r>0) ,并画出其结构图。
第6题
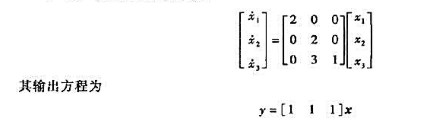
某系统动态方程
①判断系统的可控性和可观测性。
②若系统不可控,试进行可控性分解。
③求该系统由输入u到输出y的传递函数,并求u(t)=δ(t)时的单位脉冲响应y(t)。
第7题
试证明下列命题。
① 可控性矩阵的秩为n1<n2,证明:

②对n维单输入-单输出系统,证明:若(A,b)可控,则一定存在行向量c,使得(A,c)可观测。
③对n维单输入-单输出系统(A,b,c) ,证明:

第9题
设系统状态方程为:
 试说明可否用状态反馈任意配置闭环极点,若可以,求状态反馈矩阵,使闭环极点位:j[=
试说明可否用状态反馈任意配置闭环极点,若可以,求状态反馈矩阵,使闭环极点位:j[=
 ,并画出状态变量图。
,并画出状态变量图。
第11题
线性定常系统的齐次状态方程为
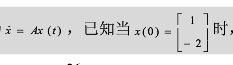
 。试求(1)系统的状态转移矩阵;(2)系统矩阵A。
。试求(1)系统的状态转移矩阵;(2)系统矩阵A。
 相关内容
相关内容

 警告:系统检测到您的账号存在安全风险
警告:系统检测到您的账号存在安全风险
为了保护您的账号安全,请在“赏学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!