 重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
题目
A.网口
B.DeviceNet接口
C.RS232接口
D.RS484接口
 更多“要在个人电脑上设置工业机器人用户,需要将个人电脑与机器人通过()进行连接。”相关的问题
更多“要在个人电脑上设置工业机器人用户,需要将个人电脑与机器人通过()进行连接。”相关的问题
第1题
A.工业机器人原则上使用行车等机械进行吊装
B.工业机器人吊装之前,需要将工业机器人的关节轴调整到符合吊装要求的姿态
C.工业机器人吊装过程中,需要在工业机器人与吊带贴合处用防护软垫等物品保护
D.一般采用钢丝绳进行工业机器人的吊装
第3题
A.在工业机器人周围设置安全栅栏,并在安全栅栏入口处张贴“远离作业区”警示牌
B.在工业机器人本体安装工具或辅件时,需要在工业机器人手动运动模式下才能进行
C.未受培训的人员禁止接触工业机器人控制柜和示教器
D.示教器使用完毕后,请挂在工业机器人本体上,以便下次操作
第4题
A.工作使用中机器人不可能丢失掉原点数据,不再需要重新进行零点复归
B.同一品牌工业机器人各个型号的会有所不同
C.相同工业机器人品牌的不同型号的机械原点刻度位置要求一致
D.以上说法都不对
第6题
下图为ABB工业机器人DSQC652板卡结构图,其中标注的C区域接口主要用于()。

A.机器人数字输出信号连接
B.DeviceNet通讯
C.机器人数字输入信号连接
D.机器人信号状态显示
第7题
下图为ABB工业机器人DSQC651板卡结构图,其中标注的F区域接口主要用于()。
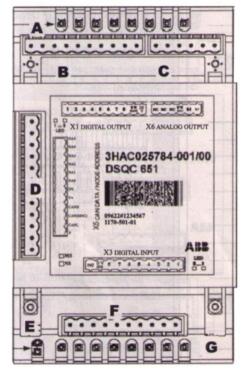
A.机器人数字输出信号连接
B.DeviceNet通讯
C.机器人数字输入信号连接
D.机器人信号状态显示
第8题
A.确认工业机器人基座是否有松动
B.微调工业机器人外围设备的位置,使工业机器人TCP正好能够到达相对正确的位置
C.重新进行零点标定
D.确认工业机器人没有超载,且发生碰撞
第10题
Internet采用的协议簇为();若将个人电脑通过市话网上 Internet需配置()
 相关内容
相关内容
 库房材料按已存放时间分类,并对已存放超100天的材料进行统计,报物资公司负责人审查。()
库房材料出库通过“存货核算”模块,新增资产通过“固定资产”模块,因不同模块不能合并生成凭证,需通过其他科目过渡。()
收到发票需核对发票上购买方名称及纳税人识别号等信息准确无误,发票所记载的产品名称、数量、单价及金额与结算单数据一致,与合同约定税率一致。()
存货调拨由物资公司统一管理,因个别突发事件不能及时通过采购解决存货,在其他公司可调拨的,由物资需求单位提出申请,物资公司在全集团内审核并签发调拨单。()
大宗材料货款、备品备件在“应付管理”模块结算;大宗材料运费在“总账”模块结算。()
材料结算时货物流、合同流、发票流、资金流大可不必统一对应。()
库房材料按已存放时间分类,并对已存放超100天的材料进行统计,报物资公司负责人审查。()
库房材料出库通过“存货核算”模块,新增资产通过“固定资产”模块,因不同模块不能合并生成凭证,需通过其他科目过渡。()
收到发票需核对发票上购买方名称及纳税人识别号等信息准确无误,发票所记载的产品名称、数量、单价及金额与结算单数据一致,与合同约定税率一致。()
存货调拨由物资公司统一管理,因个别突发事件不能及时通过采购解决存货,在其他公司可调拨的,由物资需求单位提出申请,物资公司在全集团内审核并签发调拨单。()
大宗材料货款、备品备件在“应付管理”模块结算;大宗材料运费在“总账”模块结算。()
材料结算时货物流、合同流、发票流、资金流大可不必统一对应。()

 警告:系统检测到您的账号存在安全风险
警告:系统检测到您的账号存在安全风险
为了保护您的账号安全,请在“赏学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!






























