重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
题目
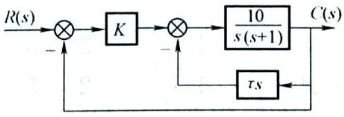
已知系统的结构图如图所示,要求系统的超调量a=16.3%,峰值时间tp=1s,求K与τ。
 更多“已知系统的结构图如图所示,要求系统的超调量a=16.3%,峰值时间tp=1s,求K与τ。”相关的问题
更多“已知系统的结构图如图所示,要求系统的超调量a=16.3%,峰值时间tp=1s,求K与τ。”相关的问题
第1题
已知单位反馈系统的开环传递函数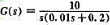 试分析:
试分析:
(1)系统是否满足超调虽σp%≤5%的要求?
(2)若不满足要求,可采用速度反馈进行改进,画出改进后系统的结构图,并确定速度反馈的参数。
(3)求出改进后系统在输入信号r(t)=2t作用下的稳态误差。
第2题
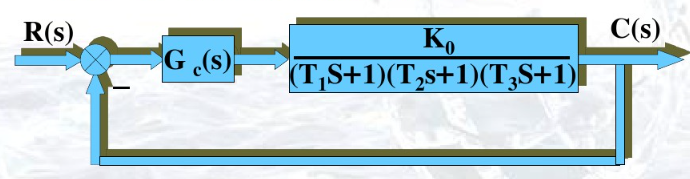
系统动态结构图如图所示。已知K0=3.2,T1=0.33,T2=0.036。要求校正后 的系统在阶跃信号输入之下无静差,同时γ'≥60°,

第3题
系统动态结构图如图所示。已知K0=3.2,T1=0.33,T2=0.036。要求校正后的系统在阶跃信号输入之下无静差,同时γ'≥60°,

第4题
调速系统动态结构图如图所示。已知K0=55.58,T1=0.049,T2=0.026,Ts= 0.00167。要求采用PI控制器进行校正,使系统实现阶跃信号输入之下无静差,并具有足够的 稳定裕量。
第5题
调速系统动态结构图如图所示。已知K0=55.58,T1=0.049,T2=0.026,Ts=0.00167。要求采用PI控制器进行校正,使系统实现阶跃信号输入之下无静差,并具有足够的稳定裕量。

第6题
已知某位置控制系统的结构图如图所示,要求计算当位置输入信号R(t)=0.5t时系统的稳态误差,并用MATLAB进行仿真分析,加以验证。

第7题
已知系统结构图如图4-10所示。
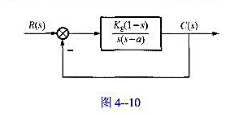
(1)当a=3时,画出Kg从0变化到+∞时的根轨迹,确定系统无超调时Kg的取值范围及系统的临界稳定时的Kg值;
(2)当Kg=3时,画出a从0变化到+∞时的根轨迹,确定系统 时的a值。
时的a值。
第9题
一系统的结构图如题6-7,要求系统的速度稳态误差系数 超调量
超调量 ,调节时间
,调节时间 试确定反馈校正装置的参数,并绘制校正前、后的波德图,写出校正后的等效开环传递函数。
试确定反馈校正装置的参数,并绘制校正前、后的波德图,写出校正后的等效开环传递函数。
 相关内容
相关内容

 警告:系统检测到您的账号存在安全风险
警告:系统检测到您的账号存在安全风险
为了保护您的账号安全,请在“赏学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!


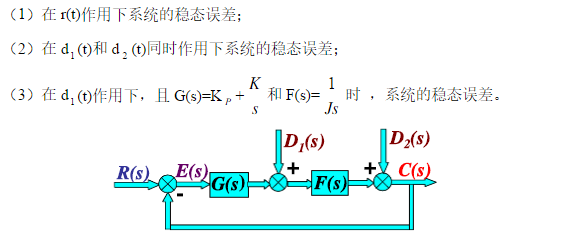
 。试求:
。试求: