 重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
题目
在极坐标系中,质点沿着图所示的直线以恒定的速度υ0运动。
(1)结合图中给出的参量,写出直线轨道方程r-θ;
(2)写出质点速度分量υr,υθ一与质点角位置θ的关系,再依据加速度分量计算公式,验证a=0,aθ=0

 更多“在极坐标系中,质点沿着图所示的直线以恒定的速度υ0运动。 (1)结合图中给出的参量,写出直线轨道方程r-θ; (2”相关的问题
更多“在极坐标系中,质点沿着图所示的直线以恒定的速度υ0运动。 (1)结合图中给出的参量,写出直线轨道方程r-θ; (2”相关的问题
第1题
在极坐标系中,质点沿着图1-8所示的直线以恒定的速度v0运动。
(1)结合图中给出的参量,写出直线轨道方程r—θ;
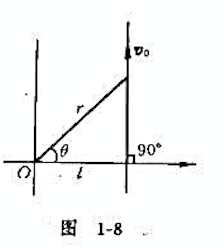
(2)写出质点速度分量vθ,与质点角位置θ的关系,再依据加速度分量计算公式,验证ar=0,aθ=0。
第2题
图6-16所示公园游戏车M固结在长为R的臂杆OM上,臂杆OM绕铅垂轴 以恒定的角速度φ=ω转动,小车M的高度
以恒定的角速度φ=ω转动,小车M的高度 与转角φ的关系为
与转角φ的关系为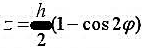 。求
。求 时,小车M在球坐标系的各速度分量:vr,vθ,vφ。
时,小车M在球坐标系的各速度分量:vr,vθ,vφ。
第3题
犬和狐狸始终连成一直线。取圆心O为坐标原点,从O到狐狸初始位置设置极轴,建立极坐标系。
(1)导出猎犬υr,υθ,ar,aθ与猎犬所在位置参量r,θ间的关系;
(2)确定猎犬运动轨道的极坐标方程,并画出轨道曲线;
(3)判断猎犬能否追上狐狸?
第4题
一质量为m的质点沿着一条曲线运动,其位置矢量在空间直角坐标系中的表达式为r= acos ti+bsin
ti+bsin tj ,其中a、b皆为常量,则此质点对原点的角动量L=_________ , 此质点所受对原点的力矩M=___________________.
tj ,其中a、b皆为常量,则此质点对原点的角动量L=_________ , 此质点所受对原点的力矩M=___________________.
第5题
一质量为m的质点沿着一条曲线运动,其位置矢量在空间直角坐标系中的表达式为r= acosti+bsintj ,其中a、b皆为常量,则此质点对原点的角动量L=_________ , 此质点所受对原点的力矩M=___________________.
第6题
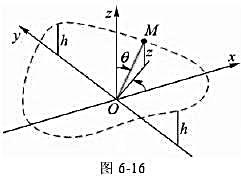
飞机不知道的某一方向以直线形式逃去,艇速20n mile/h。飞机以速度40n mile/h按照待定的航线搜索潜艇,当且仅当飞到艇的正上方时才可发现它。
(1)以O为原点建立极坐标系(r,θ),A点位于θ=0的向径上,见下图。分析图中由P,Q,R组成的小三角形,证明在有限时间内飞机一定可以搜索到潜艇的航线,是先从A点沿直线飞到某点P0,再从P0沿一条对数螺线飞行一周,而P0是一个圆周上的任一点。给出对数螺线的表达式,并画出一条航线的示意图。
(2)为了使整条航线是光滑的,直线段应与对数螺线在P0点相切,找出这条光滑的航线。
(3)在所有一定可以发现潜艇的航线中哪一条航线最短,长度是多少?光滑航线的长度又是多少?
第7题
A.在直角坐标系中直线的参数方程为为参数),以原点为极点轴正半轴为极轴建立极坐标系曲线的极坐标方程为
B.(1)求直线的普通方程与曲线的直角坐标方程
C.(2)设直线与曲线交于点,若点的坐标为,求的值
第8题
若一平面简谐波在均匀介质中以速度u传播,已知a点的振动表达式为


第10题
考虑图13-35所示的反馈系统,其
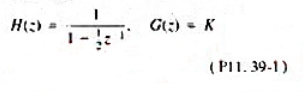
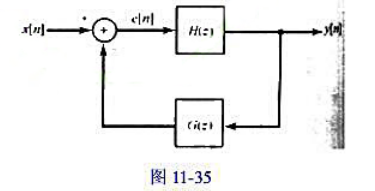
(a)画出K>0时的根轨迹图。
(b)画出K<0时的根轨迹图。注意:对这个根轨迹要细心些。在实轴上应用角判据会发现,随着K从零开始减小,闭环极点沿着正实轴。
趋向于z=+∞然后再沿着负实轴从z=-∞返回来。验证这一点实际上是把闭环极点作为K的函数,以显式求解的情况。试问K为何值时,极点在|x|=∞?
(c)求出使闭环系统稳定的全部K值的范围。
(d)在(b)中看到的现象是如下事实的一个直接结果:在这个例子中,G(z)H(z)的分子分母同阶次。当这种情况出现在离散时间反馈系统中时,意味着在系统中存在一个无延迟的回路。也就是说,在一个给定时间点上的输出被反馈到系统中,又依次返回来影响在同一时刻点上的自身值。为了能看出这正是在这个例子中考虑的情况,试写出联系y[n]和e[n]的差分方程,然后利用该反馈系统的输入和输出表示e[n],将此结果与

的反馈系统的结果相对照。
具有无延迟回路的主要后果是:这样的反馈系统是不能按所画出的反馈形式来实现的。
(e)证明:除了使闭环极点在|z|=∞的K值以外,式(P11.39-1)代表了一个因果系统。
 相关内容
相关内容

 警告:系统检测到您的账号存在安全风险
警告:系统检测到您的账号存在安全风险
为了保护您的账号安全,请在“赏学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!































