重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
题目
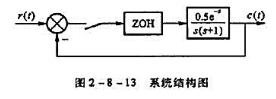
系统结构如图3.62所示,
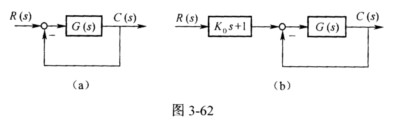 ,定义误差e(t)=r(t)-c(t)。 试求: (1)若希望图3-62(a)中系统所有的特征根位于s平面上s=-2的左侧,且阻尼比为0.5,求满足条件的K,T的取值范围。 (2)求图3-62(a)系统的单位斜坡输入下的稳态误差。 (3)为了使稳态误差为零,让斜坡输入先通过一个比例微分环节,如图3-62(b)所示,试求出合适的K0值。
,定义误差e(t)=r(t)-c(t)。 试求: (1)若希望图3-62(a)中系统所有的特征根位于s平面上s=-2的左侧,且阻尼比为0.5,求满足条件的K,T的取值范围。 (2)求图3-62(a)系统的单位斜坡输入下的稳态误差。 (3)为了使稳态误差为零,让斜坡输入先通过一个比例微分环节,如图3-62(b)所示,试求出合适的K0值。
 更多“系统结构如图3.62所示,,定义误差e(t)=r(t)-c(t)。 试求: (1)若希望图3-62(a)中系统”相关的问题
更多“系统结构如图3.62所示,,定义误差e(t)=r(t)-c(t)。 试求: (1)若希望图3-62(a)中系统”相关的问题
第1题
的值。
第2题
系统结构如图3-1所示,Gs=K/[s(Ts+1)],定义误差e(t)=r(t)-c(t)。
![系统结构如图3-1所示,Gs=K/[s(Ts+1)],定义误差e(t)=r(t)-c(t)。(1)](https://img2.soutiyun.com/ask/2020-06-17/961240937618633.png)
(1) 若希望图a中,系统所有的特征根位于s平面上s=-2的左侧,且阻尼比为0.5,求满足条件的K,T的取值范围。
(2)求图a系统的单位斜坡输入下的稳态误差。
(3)为了使稳态误差为零,让斜坡输入先通过一个比例微分环节,如图b所示,试求出合适的KD值。
第3题
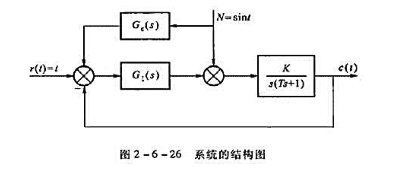
系统的结构图如图2-6-26 所示。图中K>0,T>0,误差的定义为R-C。
①设计G1(s)、Gc(s)使系统在干扰N和控制输入r同时作用下无稳态误差。
②若不采用图中的干扰补偿方案,而改为只用G1(s)来消除干扰N和r同时作用下的稳态误差,问G1(s)应如何设计,说明G1(s)结构和参数应满足的条件。
第4题
如图3-2所示的控制系统结构图,误差E(s)在输入端定义,扰动输入n(t)=2×1(t)。
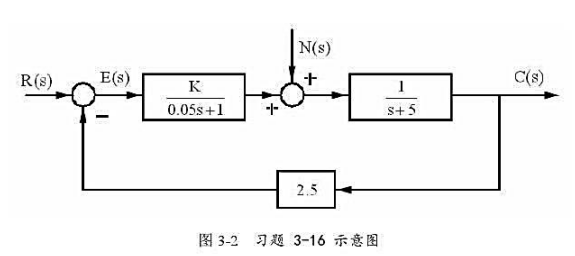
(1) 试求K=40时,系统在扰动输入下的稳态输出和稳态误差。
(2)若K=20,其结果又如何?
(3)在扰动作用点之前的前向通道中引入积分环节1/s,对其结果有何影响?在扰动作用点之后的前向通道中引入积分环节1/s,对其结果又有何影响?
第5题
系统结构如下图所示。设r(t)=r0+v0t,且误差定义为e=r-c,试求系统的稳态误差。

第6题
如图3-60所示的控制系统结构图,误差E(s)在输入端定义,扰动输入n(t)=2.1(t)。
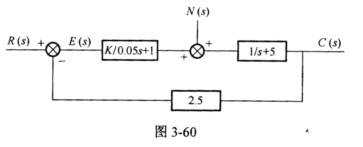 试求: (1)试求K=40时,系统在扰动输入下的稳态输出和稳态误差。 (2)若K=20,其结果又如何? (3)在扰动作用点之前的前向通道中引入积分环节1/s,对其结果有什么影响?在扰动作用点之后的前向通道中引入积分环节1/s,对其结果又有什么影响?
试求: (1)试求K=40时,系统在扰动输入下的稳态输出和稳态误差。 (2)若K=20,其结果又如何? (3)在扰动作用点之前的前向通道中引入积分环节1/s,对其结果有什么影响?在扰动作用点之后的前向通道中引入积分环节1/s,对其结果又有什么影响?
第7题
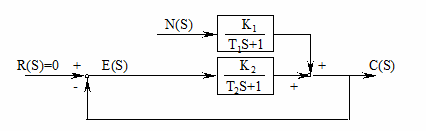
具有扰动输入n(t)的控制系统结构如图3-18所示,试求n(t)=Rn×1(t)时系统的稳态误差。
第9题
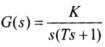
控制系统结构如图3-10所示。
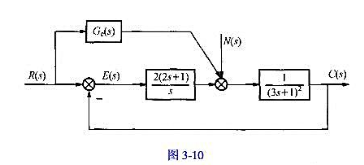
(1)当Gc(s)=0,r(t)=tX1(t),n(t)=-1(t)时,系统的总稳态误差ea;
(2)选择Gc(s),使系统在给定输入为斜坡时,稳态误差 ;
;
(3)选择Gc(s),使系统在各种给定输入时,动静态误差均为0。
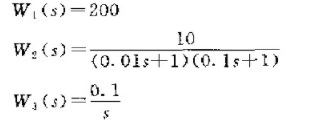
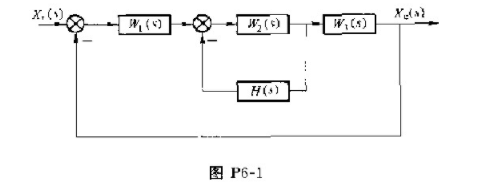
第10题
列指标:稳态位置误差 稳态速度误差
稳态速度误差 =0.5%;
=0.5%; ≥45°试确定反馈校正装置的参数,并求等效开环传递函数。图中
≥45°试确定反馈校正装置的参数,并求等效开环传递函数。图中
 相关内容
相关内容
 一、二阶系统的电子模拟及阶跃响应的动态分析 一、实验目的 1.学习典型环节的电子模拟方法及在电子模拟器上
三阶系统的模拟 一、实验目的 1.在电子模拟器上建立数学模型方法。 2.三阶系统的阶跃响应性能指标超调量σ%
频率特性的测试 一、实验目的 1.掌握频率特性的测量方法。 2.进一步明确频率特性的概念及物理意义。 3.明
频率响应的计算机辅助分析与系统的校正 一、实验目的 1.学习使用计算机分析系统的方法。 2.学习使用计算机
求阶跃函数f(t)=A·1(t)的象函数。A为常数。
求f(t)=(t-τ)·1(t)的拉氏变换。f(t)曲线示于下图,相当于t·1(t)曲线在时间t上延迟一个τ值。
一、二阶系统的电子模拟及阶跃响应的动态分析 一、实验目的 1.学习典型环节的电子模拟方法及在电子模拟器上
三阶系统的模拟 一、实验目的 1.在电子模拟器上建立数学模型方法。 2.三阶系统的阶跃响应性能指标超调量σ%
频率特性的测试 一、实验目的 1.掌握频率特性的测量方法。 2.进一步明确频率特性的概念及物理意义。 3.明
频率响应的计算机辅助分析与系统的校正 一、实验目的 1.学习使用计算机分析系统的方法。 2.学习使用计算机
求阶跃函数f(t)=A·1(t)的象函数。A为常数。
求f(t)=(t-τ)·1(t)的拉氏变换。f(t)曲线示于下图,相当于t·1(t)曲线在时间t上延迟一个τ值。

 警告:系统检测到您的账号存在安全风险
警告:系统检测到您的账号存在安全风险
为了保护您的账号安全,请在“赏学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!