 重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
题目
 更多“变换中心是使用变换坐标系的原点作为旋转和比例缩放的中心。()”相关的问题
更多“变换中心是使用变换坐标系的原点作为旋转和比例缩放的中心。()”相关的问题
第2题
A.经过2次初等旋转变换,即可使两个坐标系完全重合
B.经过1次初等旋转变换,即可使两个坐标系完全重合
C.仅通过初等旋转变换,不能使两个坐标系完全重合
D.至少经过3次初等旋转变换,才可使两个坐标系完全重合
第5题
A.pushMatrix()将当前的视图矩阵压入堆栈,保存坐标系。
B.popMatrix()将视图矩阵弹出堆栈,恢复原先的坐标系。
C.translate(x, y)将原点由(0,0)移动到(x,y)处。
D.rotate(angle)绕原点顺时针旋转。
第6题
设新旧坐标系都是右手直角坐标系,点的坐标变换公式为
(1)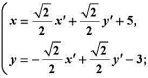
(2)
其中,(x,y)与(x',y')分别表示同一点的旧坐标与新坐标,求新坐标系的原点的旧坐标,并且求坐标轴旋转的角θ.
第8题
B.观察坐标系是指摄像机在世界坐标系中的位置
C.观察坐标系是指将摄像机变换到世界坐标系的原点,并将其旋转,使摄像机的光轴与世界坐标系Z轴正方向一致,同样世界坐标系的其他物体也做同样的变换
D.观察坐标系与物体的局部坐标系一致
第9题
已知直线 AB 两端点的坐标为 A(2,3),B(5,6).写出使直线 AB 以坐标原点为中心顺时针旋转 90 的变换矩阵,并求出变换后直线 AB 的坐标矩阵。
 相关内容
相关内容

 警告:系统检测到您的账号存在安全风险
警告:系统检测到您的账号存在安全风险
为了保护您的账号安全,请在“赏学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!































