 重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
题目
A.起飞阶段
B.巡航阶段
C.进近着陆阶段
D.进近着陆和起飞阶段
 更多“无线电高度主要用于飞机的()”相关的问题
更多“无线电高度主要用于飞机的()”相关的问题
第3题
【问题1】(6分) 状态图和活动图是软件系统设计建模中常用的两种手段,请用200字以内文字简要说明状态图和活动图的含义及其区别。 【问题2】(10分) 根据题干中描述的基本功能需求,架构师王工通过对需求的分析和总结给出了无人直升机控制系统纵向控制状态图(图2-1)。请根据题干描述,提炼出相应状态及条件,并完善图2-1所示状态图中的(1)~(5),将答案填写在答题纸中。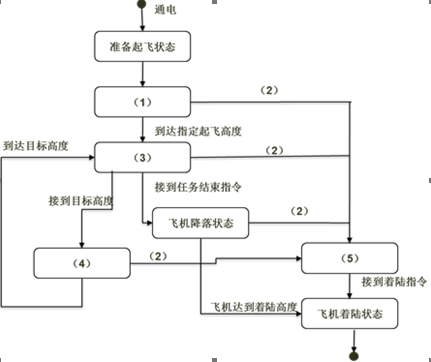 图2-1 无人直升机控制系统纵向控制状态图 【问题3】(9分) 根据题目中描述的基本功能需求,架构师王工给出了无人直升机控制系统纵向控制的顶层活动图(图2-2)。请根据题干描述,完善图2-2活动图的(1)-(9),将答案填写在答题纸中。
图2-1 无人直升机控制系统纵向控制状态图 【问题3】(9分) 根据题目中描述的基本功能需求,架构师王工给出了无人直升机控制系统纵向控制的顶层活动图(图2-2)。请根据题干描述,完善图2-2活动图的(1)-(9),将答案填写在答题纸中。 图2-2 无人直升机控制系统纵向控制顶层活动图
图2-2 无人直升机控制系统纵向控制顶层活动图
第4题
A.当执行"DIRTO"时(在LOC方式下低于700英尺无线电高度除外)
B.起飞后在15英尺时自动接通(若在地面已预位)
C.当飞机接近飞行计划的现用航段(~1海里内)时,按下HDG/TRK选钮
D.当NAV方式预位且飞机到达现用飞行计划航段的截获区时,飞行中自动
第5题
A.当执行“DIRTO”时(在LOC方式下低于700英尺无线电高度除外)
B.起飞后在15英尺时自动接通(若在地面已预位)
C.当飞机接近飞行计划的现用航段(~1海里内)时,按下HDG/TRK选钮
D.当NAV方式预位且飞机到达现用飞行计划航段的截获区时,飞行中自动
第6题
A.宽度及纵向坡度的位臵,方位
B.宽度及纵向坡度的位臵,高度
C.长度及纵向坡度的位臵,高度
D.长度及纵向坡度的位臵,方位
第10题
A.起飞、爬升到巡航高度、巡航、下降及进近并着陆
B.起飞、巡航、下降
C.起飞、巡航、下降及进近并着陆
 相关内容
相关内容

 警告:系统检测到您的账号存在安全风险
警告:系统检测到您的账号存在安全风险
为了保护您的账号安全,请在“赏学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!































