重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
题目
设单位反馈控制系统的开环传递函数为

试确定相角裕度为45°时的α值。
 更多“设单位反馈控制系统的开环传递函数为 试确定相角裕度为45°时的α值。”相关的问题
更多“设单位反馈控制系统的开环传递函数为 试确定相角裕度为45°时的α值。”相关的问题
第2题
设单位反馈控制系统的开环传递函数为 ,试确定引起闭环系统持续振荡的K值和相应的振荡频率ω。
,试确定引起闭环系统持续振荡的K值和相应的振荡频率ω。
第4题
设单位反馈控制系统的开环传递函数为

试采用二阶参考模型法设计校正装置Ge(s),使得校正后实现下述性能指标
(a)静志速度误差系数工ky≥10:
(b)阶跃响应的过渡时间te<0.4秒:
第5题
设单位反馈控制系统的开环传递函数为 根轨迹图如题图所示。
根轨迹图如题图所示。
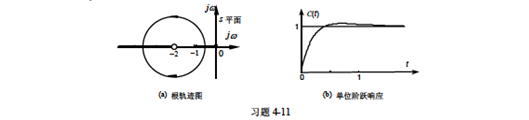
(1)当系统的阻尼振荡频率 时,试确定闭环主导极点的值与相应的增益值。
时,试确定闭环主导极点的值与相应的增益值。
(2)当系统的阻尼参数ζ=1时,其单位阶跃响应如题图所示,试分析超调量产生的原因。
第6题
已知单位反馈控制系统的开环传递函数如下。试求各系统的静态位置误差系数Kp,速度误差系数Ka和加速度误差系数Kv,并确定当输入信号分别为 和1+2t+t2时系统的稳态误差ess
和1+2t+t2时系统的稳态误差ess

第7题
已知单位反馈控制系统的开环传递函数如下。
试求各系统的静态位置误差系数Kp,速度误差系数Kv和加速度误差系数Ka,并确定当输入信号分别为r(t)=ε(t)、2t、t2和1+2t+t2时系统的稳态误差ess。
 相关内容
相关内容

 警告:系统检测到您的账号存在安全风险
警告:系统检测到您的账号存在安全风险
为了保护您的账号安全,请在“赏学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!


 ,当系统作用以下输入信号
,当系统作用以下输入信号