 重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
题目
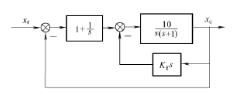
已知系统结构如图3-13所示。试用劳斯判据判定使系统稳定的Kf值范围。
 更多“已知系统结构如图3-13所示。试用劳斯判据判定使系统稳定的Kf值范围。”相关的问题
更多“已知系统结构如图3-13所示。试用劳斯判据判定使系统稳定的Kf值范围。”相关的问题
第3题
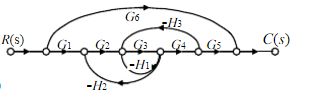
已知系统结构图如图2-49所示,图中R (s) 为输入信号,N (s)为干扰信号,C (s)为输出信号。
(1)试求传递函数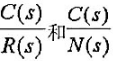 ;
;
(2)若此时系统特征方程为D (s) =s6+4s-4s5+4s3-7s2-8s+10=0, 试用劳斯判据判断系统的稳定性,系统是否有在s右半平面和虚轴上的特征根?若有,请求出这些根。
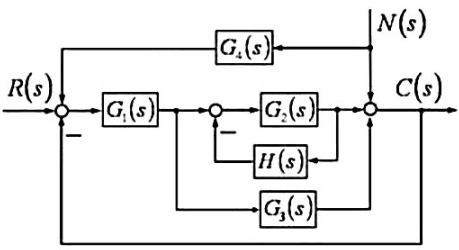
图2-49
第4题
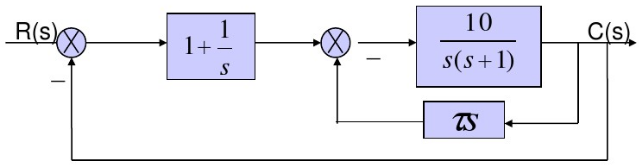
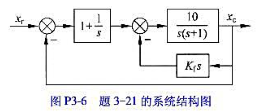
现代船舶航向控制系统如图 3-13所示。N(s)表示持续不断的风力扰动,已知 ,增益K1=5或K1=30。要求在下面所给的条件下,确定风力对船舶航向的稳态影响:
,增益K1=5或K1=30。要求在下面所给的条件下,确定风力对船舶航向的稳态影响:
(1)假定方向舵的输入R(s)=0,系统没有任何其他扰动,或其他调整措施;
(2)证明操纵方向舵能使航向偏离重新归零。
图3-13 船舶航向控制系统
第5题
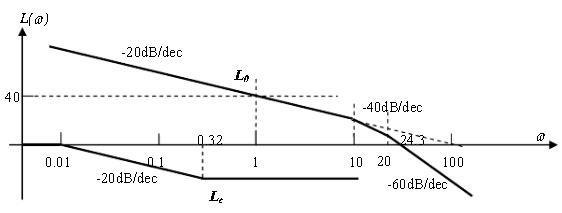
已知单位反馈最小相位系统的开环对数幅频特性L0(ω)和串联校正装置的对数幅频特性Lc(ω)如图6-17所示。原系统的幅值穿越频率为24.3rad/s:
1、 写出原系统的开环传递函数G0(s),并求其相角裕度y0,判断系统的稳定性;
2、 写出校正装置的传递函数G0(s);
3、写出校正后的开环传递函数G0(s)Gc(s),画出校正后系统的开环对数幅频特性LGC(ω),并用劳斯判据判断系统的稳定性。
第6题
已知系统特征方程为
3s4+10s3+5s2+s+2=0
试用劳斯稳定判据判断确定系统的稳定性。
第9题
已知i=0时正弦量的值分别为 它们的相量图如图3-13所示,试写出正弦量的瞬时值表达式及相量式。
它们的相量图如图3-13所示,试写出正弦量的瞬时值表达式及相量式。

第10题
已知控制系统的特征方程式为
(1)s5+s4+4s3+4s2+2s+1=0
(2)s3+10s2+16s+160=0
试用劳斯判据判别系统的稳定性。若系统不稳定,说明不稳定根的数目。
 相关内容
相关内容

 警告:系统检测到您的账号存在安全风险
警告:系统检测到您的账号存在安全风险
为了保护您的账号安全,请在“赏学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 试用劳斯判据确定使闭环系统稳定的K的取值范围。
试用劳斯判据确定使闭环系统稳定的K的取值范围。





























