 重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
题目
系统的微分方程如下,式中:τ、K1、K2、K3、K4、K5、T均为正的常数。试建立系统r(t)对c(t)的动态结构图,并求出系统的传递函数C(s)/R(s)。

 更多“系统的微分方程如下,式中:τ、K1、K2、K3、K4、K5、T均为正的常数。试建立系统r(”相关的问题
更多“系统的微分方程如下,式中:τ、K1、K2、K3、K4、K5、T均为正的常数。试建立系统r(”相关的问题
第1题
系统的微分方程组如下

式中:K0、K1、K2、T均为正常数。试建立系统结构图,并求出传递函数C(s)/R(s)、C(s)/N1(s)、C(s)/N2(s)。
第2题
 式中,r(t)为系统的输入量;n1(t)、n2(t)为系统的扰动量;C(t)为系统的输出量;x1(t)~x5(t)为中间变量;K0、K1、K2为常值增益;T为时间常数。
式中,r(t)为系统的输入量;n1(t)、n2(t)为系统的扰动量;C(t)为系统的输出量;x1(t)~x5(t)为中间变量;K0、K1、K2为常值增益;T为时间常数。
试绘制该控制系统的传递函数方框图,并由此方框图求取闭环传递函数C(s)/R(s)、C(s)/N1(s)及C(s)/N2(s)。
第3题
 应等于沿此方向施加之各种加速度之和,包括重力加速度、小草加速度和扰动加速度,按此要求建立的系统动态方程如下
应等于沿此方向施加之各种加速度之和,包括重力加速度、小草加速度和扰动加速度,按此要求建立的系统动态方程如下
此模型为非线性微分方程,在摆处于垂直位置附近,即θ(t)很小的情况下,取如下近似: ,得到如下简化的线性方程
,得到如下简化的线性方程

(1)设x(t)为激励信号,θ(t)是响应信号,若小车不动,即a(t)=0,写出系统函数 表达式,并讨论系统的稳定性.
表达式,并讨论系统的稳定性.
(2)研究适当移动小车对稳定性的影响.假定随θ(t)之变化按比例反馈作用使小车产生加速度,即a(t)=Kθ(t),K为比例系数.画出引入反馈后的系统方框图,并求反馈系统的系统函数.讨论系统的稳定性(分为Kg三种情况).
(3)改用比例-微分(PD)反馈控制,即

其中K1和K2都为正实系数.写出此反馈系统的系统函数,讨论为使系统稳定,K1,K2应满足何种约束条件?
第4题
设随动系统的微分方程为
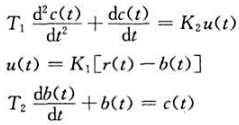
其中,T1,T2和K2为正常数。若要求r(t)=1+t时,c(t)对r(t)的稳态误差不大于正常数ε0,试问K1应满足什么条件?已知全部初始条件为零。
第5题
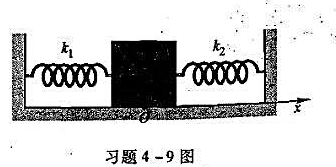
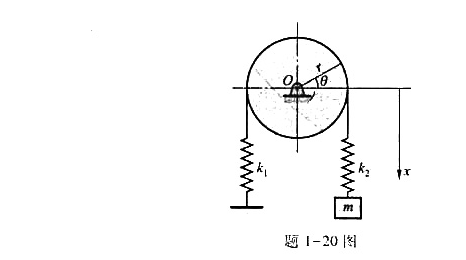
证明:图示的振动系统的振动频率为
式中k1、k2分别为两个水平弹簧的劲度系数,m为物体的质量。
第6题
设已知描述某控制系统的运动方程组如下
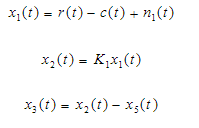
x1(t)=r(t)-C(t)+n1(t) (1)
x2(t)=K1x1(t) (2)
x3(t)=x2(t)-x5(t) (3)
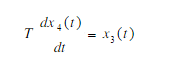 (4)
(4)
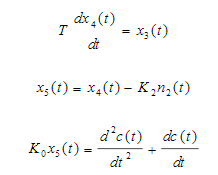
x5(t)=x4(t)-K2n2(t) (5)
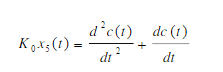 (6)
(6)
式中,r(t)为系统的输入量;n1(t)、n2(t)为系统的扰动量;C(t)为系统的输出量;x1(t)~x5(t)为中间变量;K0、K1、K2为常值增益;T为时间常数。
试绘制该控制系统的传递函数方框图,并由此方框图求取闭环传递函数C(s)/R(s)、C(s)/N1(s)及C(s)/N2(s)。
第7题
在某些生物体中,存在一种超氧化物歧化酶(E),它可将有害的 变为O2,反应如下
变为O2,反应如下

今在pH=9.1,酶的初始浓度 时,测得下列实验数据:
时,测得下列实验数据:
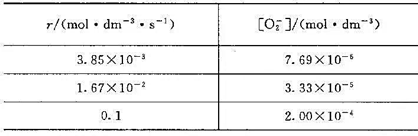
r/(mol·dm-3·s-1)是以产物O2表示的反应速率。设此反应的机理为
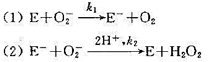
式中,E-为中间产物,可看做自由基。已知k2=2k1,计算k1和k2。
第8题
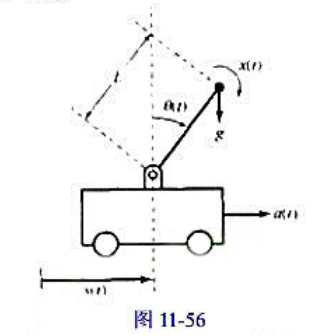
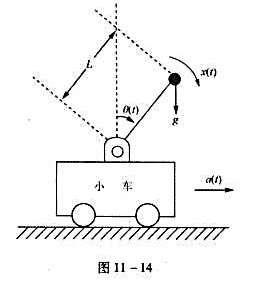
本题的目的是分析这个倒立摆的动态特性,具体而言是通过合理地选择小车加速度a(t)来研究该倒立摆的平衡问题。联系θ(t)、a(t)和x(t)的微分方程是

这个关系是将该质量沿垂直于杆的方向上的实际加速度与沿此方向外加的加速度(包括重力加速度、由于x(t)引起的扰动加速度和小车的加速度)相等。
注意,式(P11.56-1)是一个非线性微分方程。详细而严格地分析了这个摆的特性,仔细考虑这一方程,然而通过线性化分析,还是能够得到有关这个摆的动态特性的大量细节。具体而言,当考虑该摆接近垂直位置,即θ(t)很小时摆的动态特性。这时可给出如下近似:sin[θ(t)]≈θ(t),cos[θ(t)]≈1(P11.56-2)。
(a) 假设小车是静止的,即a(t)=0,研究由式(P11.56-1)所描述的输入为x(t),输出为θ(t)的因果线性时不变系统,再结合由式(P11.56-2)给出的近似关系,求出该系统的系统函数,并证明它在右半平面有一个极点,这意味着这个系统是不稳定的。
(b)在(a)中的结果表明,如果小车是静止不动的,那么任何由x(t)造成的微小角扰动都将导致偏离垂直方向的角度进一步增大。很明显,在某一点,这种角偏离已经大到使式(P11.56-2)的近似不再成立,在这一点上线性化分析不再正确。但是,正由于小的角偏离时这个近似是对的,才得出这个垂直平衡点是不稳定的,因为小的角度偏离将一直增加,而不是最终消失.现在要研究当小车以适当的方式移动时,摆在垂直位置的稳定问题。设想采用比例反馈,即a(t)=Kθ(t)。
假定θ(t)很小,所以式(P11.56-2)有效。试以θ(t)作为输出,x(t)作为外部输入,a(t)作为反馈信号,画出这个线性化的系统方框图。证明:所得到的闭环系统是不稳定的。试求出,当x(t)=δ(t)时该摆以无阻尼振荡方式来回摆动的K值。
(c)现在考虑使用比例加微分(PD)反馈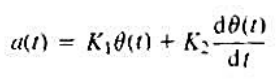 。
。
证明:可以求出使摆稳定的K1和K2值。事实上,利用下列g和L的值:

可以选择K1和K2的值,使得闭环系统的阻尼系数为1,自然频率为3rad/s。
第9题
第10题
已知系统微分方程组如下:
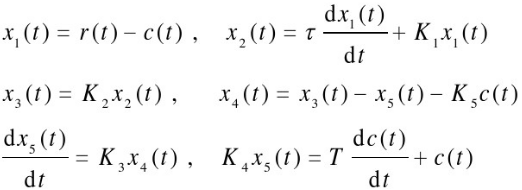
其中,τ,K1,K2,K3,K4,K5,T均为正常数。试建立r(t)对c(t)的结构图,并求系统的传递函数C(s)/R(s)。
 相关内容
相关内容

 警告:系统检测到您的账号存在安全风险
警告:系统检测到您的账号存在安全风险
为了保护您的账号安全,请在“赏学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!































