 重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
题目
 更多“将学习本课程作为一个动态系统来考虑,试分析这一动态系统的输入、输出及系统的固有特性各是什么?应采取什么”相关的问题
更多“将学习本课程作为一个动态系统来考虑,试分析这一动态系统的输入、输出及系统的固有特性各是什么?应采取什么”相关的问题
第1题
第2题
A.经验主义课程论
B.社会改造主义课程论
C.存在主义课程论
D.后现代主义课程论
第3题
B.课程内容标准上,从学习领域学习主题目标要素的角度来设计和组织课程内容,以学
C.学习为主线,充分感受到课程标准中学生和学生发展具有十分重要的地位
D.课程评价上,注重评价结论、总结性评价与形成性评价相结合、评价重心向重视学生学习转变
E.课程实施建议上,从教更好地为学服务,教更好地服务于学生发展,教更好地服务于学生学习方式转变这样一个角度来提出建议,为学生形成主动参与、独立思考、自主探究、相互合作的学习品质,提供教学环境和教学平台的支撑
第4题
第5题
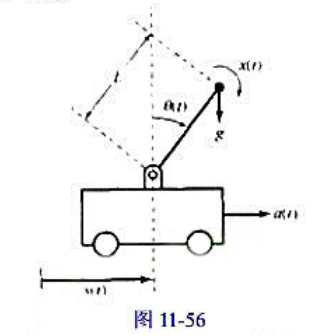
本题的目的是分析这个倒立摆的动态特性,具体而言是通过合理地选择小车加速度a(t)来研究该倒立摆的平衡问题。联系θ(t)、a(t)和x(t)的微分方程是

这个关系是将该质量沿垂直于杆的方向上的实际加速度与沿此方向外加的加速度(包括重力加速度、由于x(t)引起的扰动加速度和小车的加速度)相等。
注意,式(P11.56-1)是一个非线性微分方程。详细而严格地分析了这个摆的特性,仔细考虑这一方程,然而通过线性化分析,还是能够得到有关这个摆的动态特性的大量细节。具体而言,当考虑该摆接近垂直位置,即θ(t)很小时摆的动态特性。这时可给出如下近似:sin[θ(t)]≈θ(t),cos[θ(t)]≈1(P11.56-2)。
(a) 假设小车是静止的,即a(t)=0,研究由式(P11.56-1)所描述的输入为x(t),输出为θ(t)的因果线性时不变系统,再结合由式(P11.56-2)给出的近似关系,求出该系统的系统函数,并证明它在右半平面有一个极点,这意味着这个系统是不稳定的。
(b)在(a)中的结果表明,如果小车是静止不动的,那么任何由x(t)造成的微小角扰动都将导致偏离垂直方向的角度进一步增大。很明显,在某一点,这种角偏离已经大到使式(P11.56-2)的近似不再成立,在这一点上线性化分析不再正确。但是,正由于小的角偏离时这个近似是对的,才得出这个垂直平衡点是不稳定的,因为小的角度偏离将一直增加,而不是最终消失.现在要研究当小车以适当的方式移动时,摆在垂直位置的稳定问题。设想采用比例反馈,即a(t)=Kθ(t)。
假定θ(t)很小,所以式(P11.56-2)有效。试以θ(t)作为输出,x(t)作为外部输入,a(t)作为反馈信号,画出这个线性化的系统方框图。证明:所得到的闭环系统是不稳定的。试求出,当x(t)=δ(t)时该摆以无阻尼振荡方式来回摆动的K值。
(c)现在考虑使用比例加微分(PD)反馈 。
。
证明:可以求出使摆稳定的K1和K2值。事实上,利用下列g和L的值:

可以选择K1和K2的值,使得闭环系统的阻尼系数为1,自然频率为3rad/s。
第6题
 相关内容
相关内容

 警告:系统检测到您的账号存在安全风险
警告:系统检测到您的账号存在安全风险
为了保护您的账号安全,请在“赏学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!































