 更多“变位机的运动由( )控制。”相关的问题
更多“变位机的运动由( )控制。”相关的问题
第1题
变位机的装配台气缸松紧状态由机器人数字IO信号控制。()
点击查看答案
第2题
完整的焊接机器人系统一般由机器人操作机、变位机、控制器、焊接系统、焊接传感器、中央控制计算机和相应的安全设备等部分构成。()
点击查看答案
第3题
工业机器人弧焊工作站一般由焊接机器人、焊接电源、焊枪、送丝机构、变位机、清枪装置以及焊接供气系统等部分组成下图所示工业机器人焊接工作站系统中空白处连接线缆为()。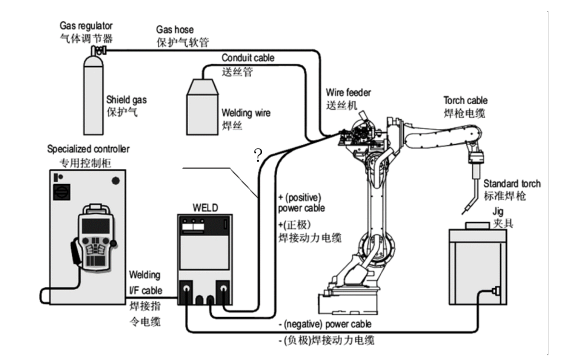
A.送丝机控制电缆
B.焊接控制线缆
C.工业机器人控制线缆
D.以上都不是
点击查看答案
第4题
下列设备中属于机器人可支持的外部群组的是()。
点击查看答案
第5题
下列设备中属于机器人可支持的外部群组的是()
点击查看答案
第6题
【判断题】在带变位机的机器人系统中,创建运动轨迹之前激活变位机,勾选“STN1”。
点击查看答案
第7题
如果将变位机翻转作为机器人的外部轴,与机器人实现联动,达到同步运行的目的。则可采用的驱动电机类型一般为()
点击查看答案
第8题
变位机的安装必须使工件的变位均处于机器人动作范围之内,并需要合理分解机器人本体和变位机的各自职能,使两者按照统一的动作规划进行作业,机器人和本体之间的运动存在两种形式:()和非协调运动。
点击查看答案
第9题
变位机在焊接过程中使工件发生平移、旋转、翻转等位置变动,与机器人同步运动或者非同步运动,从而得到理想的加工位置和焊接速度。
点击查看答案
 重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!


 警告:系统检测到您的账号存在安全风险
警告:系统检测到您的账号存在安全风险































