重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
题目
设系统微分方程为 式中,u为输入量;x为输出量。
式中,u为输入量;x为输出量。
(1)设状态变量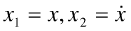 试列写动态方程;
试列写动态方程;
(2)设状态变换 试确定变换矩阵T及变换后的动态方程。
试确定变换矩阵T及变换后的动态方程。
 更多“设系统微分方程为 式中,u为输入量;x为输出量。 (1)设状态变量x1=x,,试列写动态方程; (2)设状态变换,,试确”相关的问题
更多“设系统微分方程为 式中,u为输入量;x为输出量。 (1)设状态变量x1=x,,试列写动态方程; (2)设状态变换,,试确”相关的问题
第1题
设质量-弹簧-摩擦系统如图2-1所示,途中f为黏性摩擦系数,k为弹簧系数,系统的输入量为力p(t),系统的输出量为质量m的位移x(t)。试列出系统的输入输出微分方程。

第2题
设系统微分方程为 。其中,u和y分别为系统输入和输出量。试列写能控标准型(即矩阵A为友矩阵)及能观测标准型(即矩阵A为友矩阵转置)状态空间描述,并画出状态结构图。
。其中,u和y分别为系统输入和输出量。试列写能控标准型(即矩阵A为友矩阵)及能观测标准型(即矩阵A为友矩阵转置)状态空间描述,并画出状态结构图。
第3题
某测量系统的动态微分方程为20(dY/dt)+5Y=2.0*10﹣5X,式中Y为输出电压(V),X为输入压力(Pa),求该系统的时间常数和静态灵敏度。其时间常数为___s
第4题
某被控制对象的动态方程
①设计状态反馈向量k,使得经状态反馈u=kx+r后,闭环系统在输入r=1(t)、x(0)=0时,响应的超调量为16.3%、过渡过程为7s(取5%误差带)。
②设x(0)=0,求经上述状态反馈后闭环系统在输入信号r=1(t)作用下的响应y(t)。
第5题
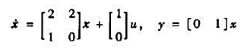
试建立图2-3所示各系统的微分方程。其中外力F(t),位移x(t)和电压ur(t)为输入量;位移y(t)和电压uc(t)为输出量;k(弹性系数),f(阻尼系数),R(电阻),C(电容)和m(质量)均为常数。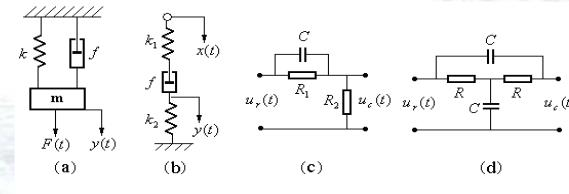
第6题
第7题
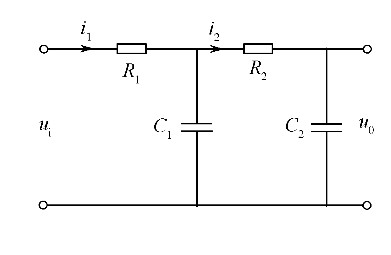
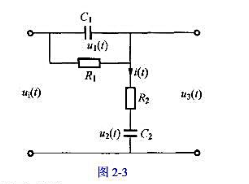
在图2-3中,以电压ui(t)为输入量。
(1)以电压u2(t)为输出量,列写微分方程;
(2)以电压u3(t)为输出量,列写微分方程;
(3)设R1=R2=0.1MS,C1=10uF, C2=2.5pF,将(1)的结果写成数字形式。
第8题
设单输入一单输出系统的状态空间表达式为

其中,x∈Rn为状态向量,u为标量输入,y为标量输出,A、b、c维数适当。
设参考输入,r (t) =sin (t), 定义跟踪误差e (t) =r (t) -y (t), 试论证系统能以零稳态误差跟踪正弦参考输入信号。
第10题
试求题1-29图所示系统的h[k]。
![试求题1-29图所示系统的h[k]。(2)设系统的初始状态为零,试确定输入信号为x[k]=cos(π](https://img2.soutiyun.com/ask/2020-09-02/967893234999926.png)
(2)设系统的初始状态为零,试确定输入信号为x[k]=cos(πk)u[k]时,系统的瞬态响应和稳态响应。
 相关内容
相关内容

 警告:系统检测到您的账号存在安全风险
警告:系统检测到您的账号存在安全风险
为了保护您的账号安全,请在“赏学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!